About Me
I am a Master's student in Robotics at the University of Pennsylvania. While being a part of the GRASP lab, I am currently working on various autonomous systems projects which lie on the intersection of Vision, Planning and Control for Robotcs.
With a strong academic background in Electronics and communication engineering, I have gained expertise in signal processing, control systems, and radar systems, among others.
Beyond academics, I love playing the guitar (Though you can also add playing the keys and the drums to that list). I also love to dive deep into the world of cinematography and animation.
With my previous experience as a Basketball captain at the School level, I joined the College men’s basketball team,
thus pushing me further into a world of sports where individuality and teamwork are on the same page; leadership qualites that could never be taught were somehow learned.
Over the next three years in the basketball team and winning laurels for the college, I learned how to follow before I lead.
I am Looking forward to join a dynamic and forward-thinking organization where I can apply my skills and knowledge to tackle real-world challenges.
With a strong work ethic and a passion for innovation, my ultimate goal is to play a key role in shaping the future of robotics and its impact on society.
As a self-motivated and detail-oriented individual, I am committed to delivering high-quality work and working collaboratively with others to achieve common goals.
Whether it's designing robots for manufacturing or developing autonomous systems for space exploration,
I am excited about the endless possibilities that lie ahead in the field of robotics.
Recent Project Work
MPC approaches for collision Free Arm Control
Operation of robotic arms in most industrial settings require predefined trajectories for control and optimization.
Most applications require obstacle avoidance and interaction at a higher level of abstraction.
In this work, we present an approach to implement an online planning and control mechanism for safe control of a 7 degree of freedom (DoF) robotic arm.
We discuss two approaches to implement static and dynamic obstacle avoidance.
We validate our algorithm on multiple maps with objects of increasing complexity in the simulation environment Gazebo.
The robots are controlled using the Robot Operating System (ROS).
We demonstrate, that our approach is real-time capable and, quite possible to execute
despite having 21 variables in the state vector and numerous constraints which significantly increase the system complexity.
MPC | ROS | Rviz | Gazebo | Python | MoveIt
Implementation: Github
Overtaking and Blocking in Autonomous Racing

We plan to leverage
the autonomy and safety of the F1tenth platform to experiment
with blocking and defensive strategies in head-to-head
autonomous racing.
We developed a system that leverages a rear-facing cam-
era to complete the blind-spots of a front-facing 2D LiDAR.
The combination of these two sensors will create a near 360
degree view of the vehicle’s immediate environment, which
would be critical in the localization of the opponent’s
position. Due to the hardware constraints of the F1tenth vehicle,
AprilTags are used to extract the approximate 3D pose of the opponent from 2D image.
Then the necessary maneuvers for blocking and defense, while accounting for the
opponent’s predicted trajectory, will be executed.
In order to effectively test the system, we also developed
a stable overtaking algorithm that performs at high velocities
and does not require the construction of an occupancy
grid. In summary, we propose an online autonomous racing
planner that can safely execute and transition between race
line following, overtaking, and blocking.
Controls + Perception + Planning Stack | ROS2 | Python | C++ | Gazebo | Rviz | Docker | Jetson Xavier NX | localization & Mapping
Implementation: Github
and video
Pick and place using Franka Emika Panda
Developed a stable and robust system for both static and dynamic block acquisition. Our code was extensively
tested in simulation and sufficiently tested on the physical robot and performs well in both environments. Different
strategies and scenarios were tested in both simulation and on the physical robot, and we implemented a robust solution to precisely stack stationery and dynamic blocks on the target platform in an efficient and safe manner by
implementing Forward and Inverse kinematics, obstacle avoidance and path planning concepts. Our code
can also stack tag 5 blocks with the white side, but we chose to skip this step in the competition because the flipping
process took more time than it would to stack two dynamic blocks.
Kinematics | RRT | Path Planning | ROS | Python | Gazebo | Rviz |
Implementation: Github
and video
Tire-Road Friction Estimation
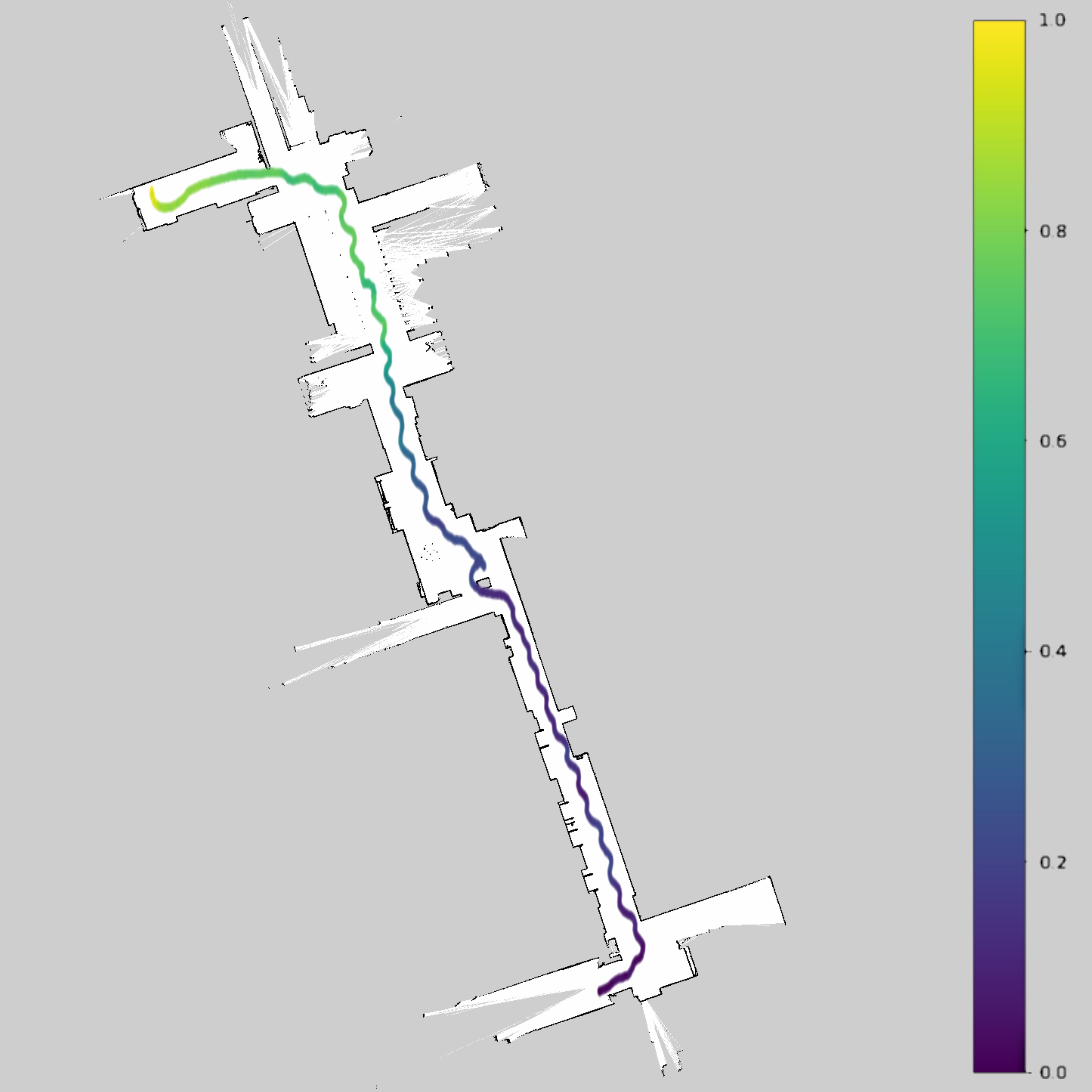
In recent years, there has been a surge in autonomous vehicle development.
However, even when algorithms perform wonderfully in simulations, transferring this success to the real world is rarely an easy process.
As such, bridging the sim-2-real gap is a crucial step in ensuring the safety of autonomous vehicles.
In this project, we attempt to decrease the size of this gap by incorporating friction estimates of the terrain that vehicles drive on.
The goal is to build a two-stage estimator that first estimates the state of our vehicle (angular and linear speeds) and use these estimates to estimate road friction.
Using this estimate of the road friction coefficient μ, we can then fuse this information into an occupancy grid, localized using a particle filter to localize estimates of the road friction coefficient at different locations in our map.
This algorithm is then tested on the F1/10th autonomous racing platform to obtain the empirical performance metrics of our estimator.
UKF | EKF | Kalman Filter | Particle Filter | Python
Impelmentation: Github
Object Detection and Image Segmentation
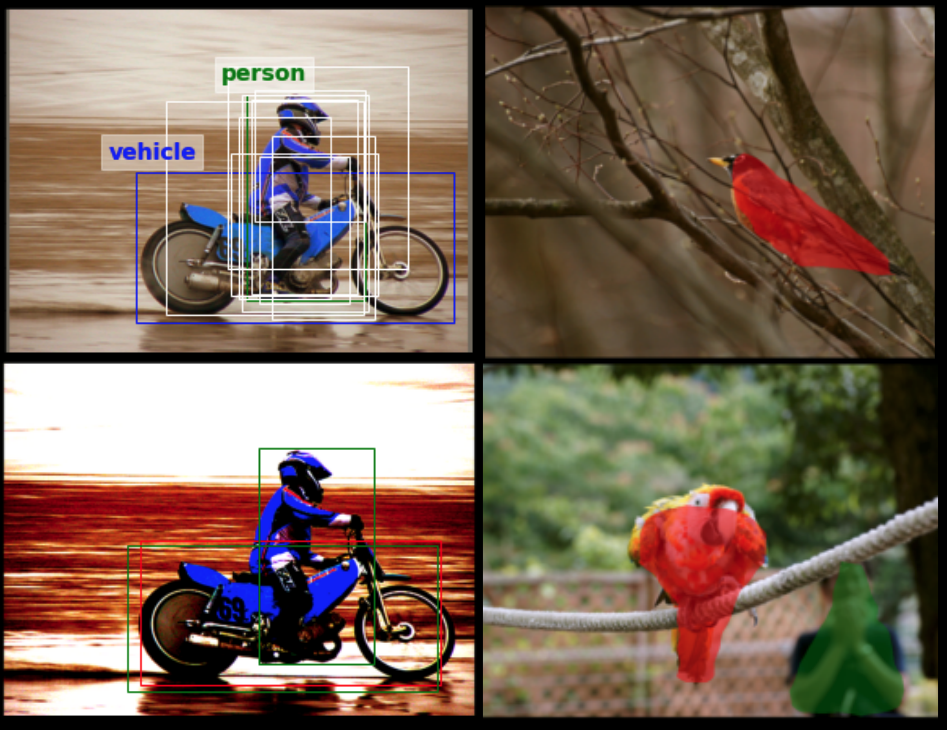
Our project presents a straightforward and versatile approach for object detection and instance segmentation,
which involves identifying and separating objects in an image.
Faster R-CNN is a region-based object detection algorithm that uses a two-stage approach.
The first stage is a region proposal network (RPN) that generates potential object locations,
and the second stage is a CNN that classifies the proposed regions and refines their bounding boxes.
Faster R-CNN is known for its high accuracy and relatively fast inference time.
Mask R-CNN extends Faster R-CNN by adding a third stage that generates pixel-level segmentation masks for each detected object.
This is achieved by adding a mask branch to the Faster R-CNN architecture, which predicts a binary mask for each object proposal.
The resulting algorithm is capable of both object detection and instance segmentation.
Python | Pytorch | pytorch-lightning | Computer Vision | Object-Detection
Additional: YOLO | SOLO
FasterRCNN: Github
MaskRCNN: Github

Risus ornare lacinia
Lorem ipsum dolor sit amet nisl sed nullam feugiat.
Work Experience and Internships
Research Assistant - Xlab for Autonomous Systems (Penn Engineering) | Philadelphia, PA
Differentiable Trajectory Generation for Car-like Robots: Implemented a computationally efficient method for approximating parametric optimal control
using differentiable trajectory generation and cost evaluation based on grid segmentations
for autonomous vehicles using radial basis function (RBF) networks.
Compared to optimizing for the polynomial solutions online at 3.25 Hz, our approach is a 70x+ speed.
Main Contributor: Paper under review
Team lead - Maverick Medicare Systems | Hyderabad, India
- Built a Smart Pill Expert System that can provide real time diagnosis with the ability to cater to the needs of single/multiple users and a failure rate of less than 5%.
- Designed the product prototypes and redefining the ‘go to market’ to reach the market segment of the under privileged. (2 Design Patents Awarded)
- Incorporated API and web services along with a medical prognosis chat-bot so that care-takers can continuously monitor the users.
Best Innovator Award - Amongst all startups across the state of Telangana - IKON Awards, India | Funded by All India Council for Technical Education (AICTE) - Ministry of Human Resource Development (MHRD) | Best Innovation Award at The Indus Entrepreneurs Business Idea Tournament (TiEGrad) across the country | Awarded gold at Bangkok IP, Innovation and Technological Exposition | Innovation Recognition Award - 9th Higher Education and Human Resource Conclave, India | Design Patents: Patent No. 322959-001, 353987-001
Summer Intern - Defence Research and Development Organisation (DRDO) | Vishakapatnam, India
- Implemented an effective method of de-noising radar signals as well as localising and detecting obstacles and moving targets using wavelet transforms.
- Compared frequency based matched filtering technique and wavelet based processing in terms of noise reduction capabilities to enhance the SNR of the signal in pulse Doppler radar.
- Validated Wavelet Transform over conventional FFT in radar signal processing based upon target range, Radar Cross Section and SNR ratio.
Summer Intern - Defence Research and Development Organisation (DRDO) | Chandipore, India
- Developed a radar imaging system in the field of surveillance for detecting obstacles and foreign objects behind various concrete structures.
- Conducted testing and validation of the radar system to ensure that it meets the required specifications and performance criteria by measuring FMCW Chirps and filtering distortions.
- Worked on processing and analyzing the RF signals to replicate an image.